


特点
实时测量XYZ三个方向所受到的力和力矩,
优化设计的应变测量结构,
24Bit高速ADC采样,
高信噪比全数字式输出,
5倍静态过载保护,
2000Hz数据输出频率,
内置高精度解耦,
滤波和温度补偿算法,
低零漂、低温漂、低轴间串扰。
工作方式
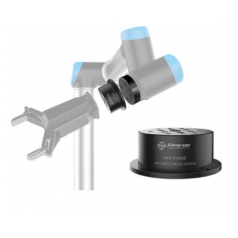
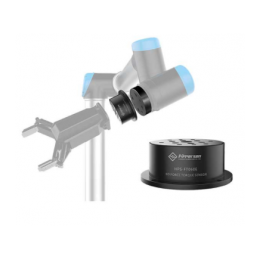
将HPS-FT060e传感器安装在机器人末端,可以实时精准测量末端工具所受力/扭矩,并解耦(Fx,Fy,Fz,Tx,Ty,Tz)。以125HZ频率与机器人实时交互,实现便捷的力控应用。


经营品牌 
企业档案  新闻中心 新闻中心
产品分类联系方式
站内搜索 友情链接
|
UNIVERSAL ROBOTS 6D力扭矩传感器系列
详细信息 HPS-FT060e传感器是高性能的数字式六维力传感器,可实现 XYZ 三个空间坐标轴上的力和力矩的精确测量。该传感器的应变体结构具有良好的抗过载和耐久性,工作时可达到数倍的安全过载。
特点
实时测量XYZ三个方向所受到的力和力矩,
优化设计的应变测量结构,
24Bit高速ADC采样,
高信噪比全数字式输出,
5倍静态过载保护,
2000Hz数据输出频率,
内置高精度解耦,
滤波和温度补偿算法,
低零漂、低温漂、低轴间串扰。
工作方式
将HPS-FT060e传感器安装在机器人末端,可以实时精准测量末端工具所受力/扭矩,并解耦(Fx,Fy,Fz,Tx,Ty,Tz)。以125HZ频率与机器人实时交互,实现便捷的力控应用。 |